Incremental 3D Semantic Scene Graph Prediction from RGB Sequences
Shun-Cheng Wu Keisuke Tateno Nassir Navab Federico Tombari
Technical University of Munich Google
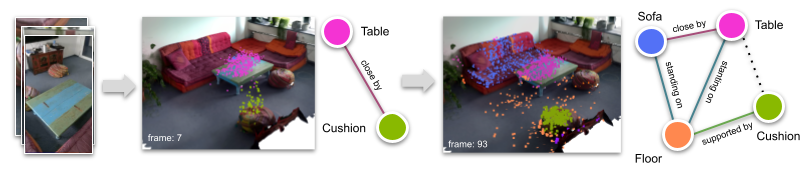
3D semantic scene graphs are a powerful holistic representation as they describe the individual objects and depict the relation between them. They are compact high-level graphs that enable many tasks requiring scene reasoning. In real-world settings, existing 3D estimation methods produce robust predictions only in conjunction with dense inputs. In this work, we propose a real-time framework that incrementally builds a consistent 3D semantic scene graph of a scene given an RGB image sequence. Our method consists of a novel incremental entity estimation pipeline and a scene graph prediction network. The proposed pipeline simultaneously reconstructs a sparse point map and fuses entity estimation from the input images. The proposed network estimates 3D semantic scene graphs with iterative message passing using multi-view and geometric features extracted from the scene entities. Extensive experiments on the 3RScan dataset show the effectiveness of the proposed method in this challenging task, outperforming state-of-theart approaches.
More info coming soon…
Video
Paper
@InProceedings{Wu_2023_CVPR,
author = {Wu, Shun-Chengand Tateno, Keisuke and Navab, Nassir and Tombari, Federico},
title = {Incremental 3D Semantic Scene Graph Prediction from RGB Sequences},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2023},
}